
On the 21st of October last year I had the privilege to defend my dissertation titled: “Arrival Management in the Presence of Prediction Uncertainty”. In this blog, I will try to summarize what ended up being 11 years of work. It will describe where prediction uncertainty occurs, how the uncertainty may be determined and how that knowledge can be applied to visual interfaces and to algorithms.
Ref. M.Tielrooij, Arrival Management Support in the Presence of Prediction Uncertainty | TU Delft Repositories
Prediction uncertainty in Air Traffic Management
Modern Air Traffic Management systems use prediction of a flight’s trajectory as the basis for controller support. These applications include Short Term Conflict Alert (STCA), Medium Term Conflict Detection and Resolution CD&R, Arrival Management (AMAN), and flow/network management. Deliberately the above collection is ranked in terms of prediction horizon: The horizon is often determined by our ability to make a sufficiently accurate prediction for the application in which it will be used.
The accuracy of the prediction depends on the knowledge of the initial state of the flight, the knowledge of future events (weather, the intent of the aircraft but also of air traffic control), the degree to which we can model factors that influence the trajectory. With increasing horizon, the number and type of future events – or disturbances – increases. Hence, if we are no longer able to know and model these, the chance of a deviation between the prediction and the actual flown trajectory increases.
A lot of research has been, and is still being done, on increasing our ability to model. However, for applications such as arrival management (which rely on a desired prediction accuracy in the other of 10 seconds), the desired horizon is too large however. The European Regulation for Common Project One requires an AMAN horizon of 180 nm for Europe’s largest airports. London Heathrow, Paris Charles de Gaulle, Frankfurt Airport are all within 180nm from Amsterdam Schiphol Airport. Arrival management then invariably would require prediction (to the same order of magnitude of 10 seconds) of processes on the ground. With A-CDM requirements currently using a scope of 5 minutes as acceptable, this seems an impossible task.
If accurate predictions are not available, the next option is to make the system robust for uncertainty. The approach taken in my dissertation is to make the knowledge of uncertainty an integral part of the decision-making process.
Predicting uncertainty
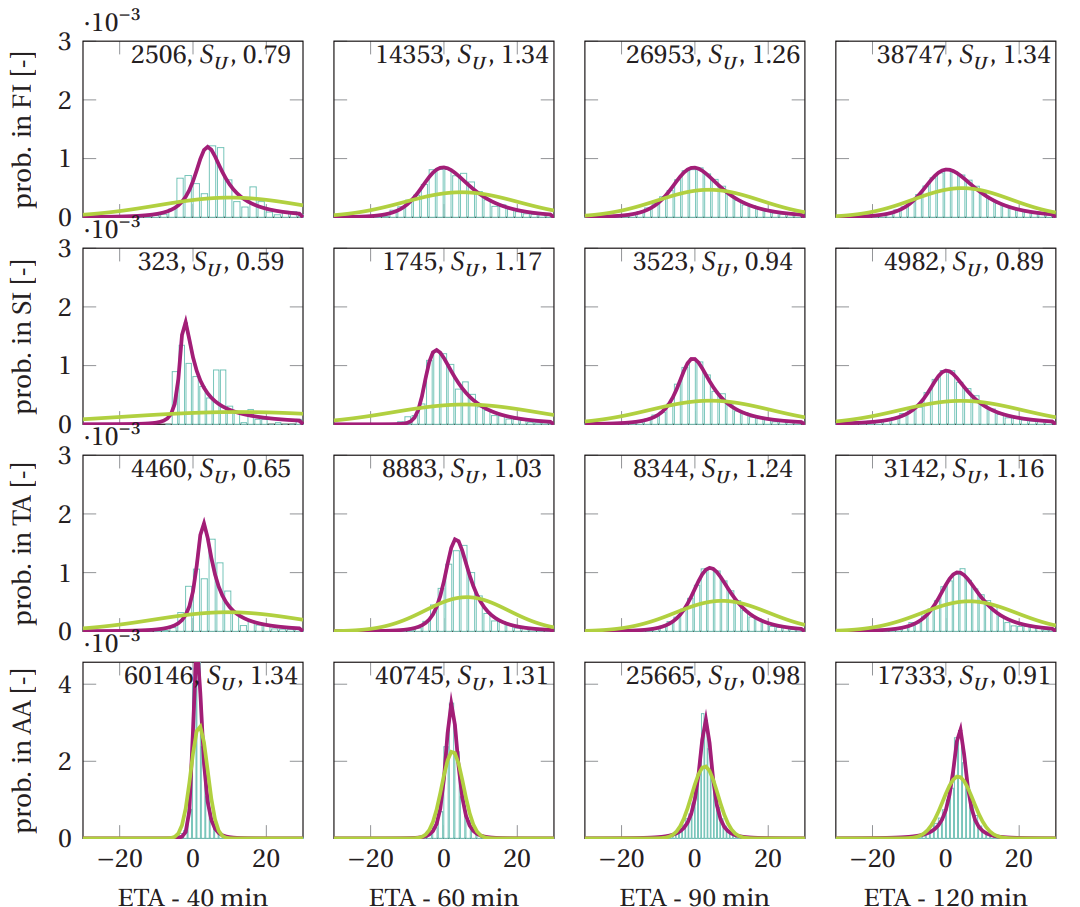
The prediction accuracy is a key performance parameter in any ATM algorithm. In testing of the design, a generic accuracy is often determined that applies to all flights for which a prediction is made. Such an approach disregards that the accuracy can vary from time to time and even from flight to flight.
By analysing predictions from the EURCONTROL Network Manager, the dissertation develops a method that evaluates the properties of a flight to determine the actual prediction uncertainty. In this way the previously described horizon could be dynamically changed based on the accuracies of the predictions at that moment. Benefitting from that requires making the abstract concept of uncertainty meaningful in regards to operational constraints.
Making the uncertainty visible
Prediction uncertainty in arrival management manifests as an uncertainty in time. The uncertainty is therefore a property of a property of a flight. This makes the concept particularly hard to visualise. By showing the potential effect of the uncertainty on the arrival management timeline, the dissertation translated the concept into an effect that can be related to constraints in decision making.
Changing our strategies
The diagram proposed above proved hard to understand for experiment operators. One critical factor in their use of the diagram was the problem that uncertainty requires a different planning approach. Critical evaluation of the display ultimately provided another route to improve strategies. Based on the diagram an algorithm was developed that provides the horizon at which a sequence swap would be unlikely. Such an algorithm could support a dynamic working horizon based on the actual prediction uncertainty of the moment. A graduate student from the Delft University of Technology recently successfully applied the algorithm on a different prediction source to support debunching of inbound traffic.
Conclusion
Prediction uncertainty is a hard problem but here to stay in aviation. This work showed pathways to start using it as another piece of information in decision-making. Within To70 I hope to apply the knowledge gained during my PhD to support ATM in working with it, rather than trying to avoid it.

Check out our open vacancies around the globe!